The Kubrick movie 2001prominently features the iconic EVA pod with its double-grippered manipulator arms. They look cool/menacing, but do they make sense mechanically?
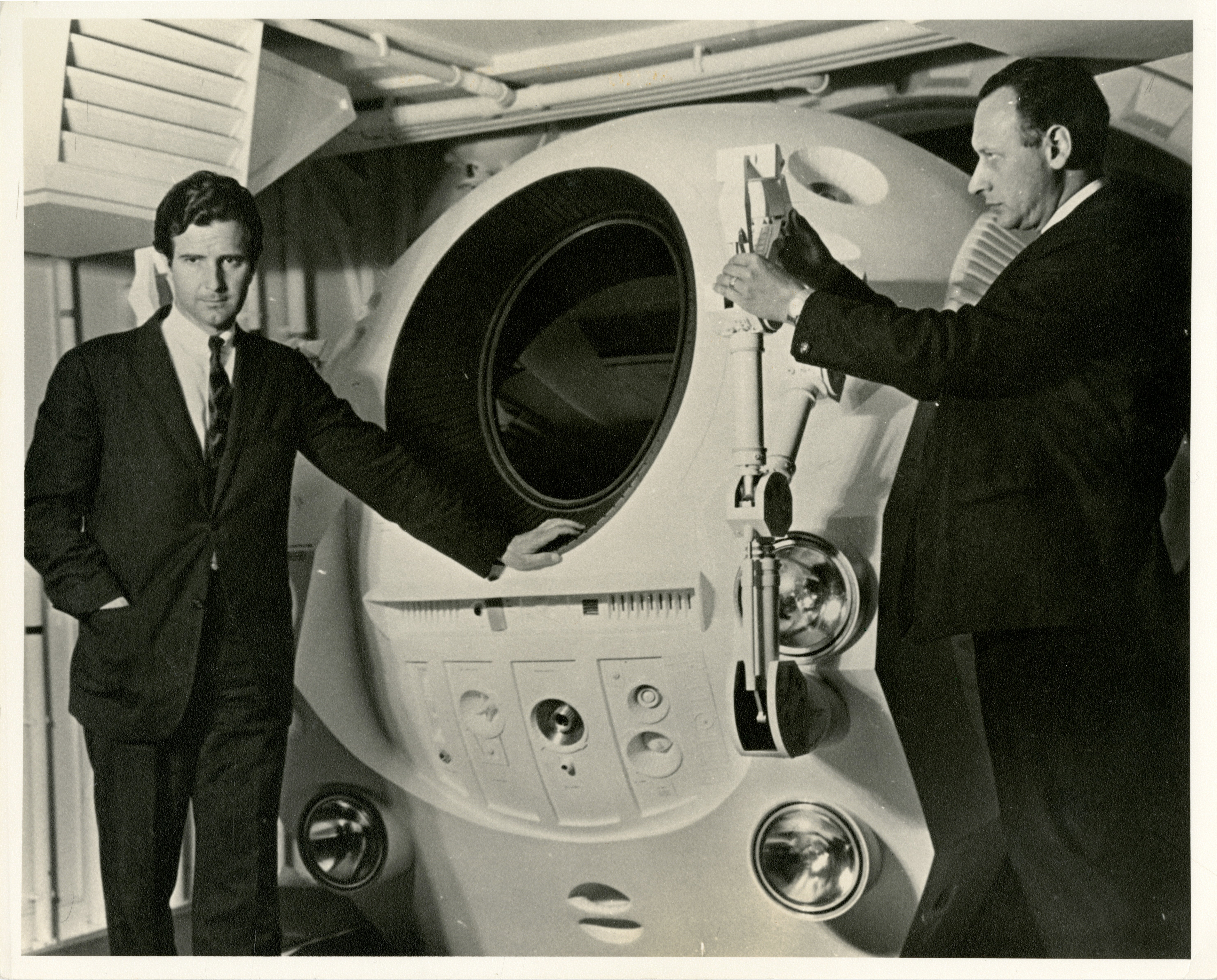
Here are some still shots of the pod arms:
And here’s a video clip showing some of the range of motion of the arms:
So the arms slide out from the main body of the pod on rails that are rectangular in cross-section, and which end in ‘shoulder’ boxes, from which an ‘upper arm’ extends to an ‘elbow’ box, from which two ‘forearms’ extend to two ‘wrist’ boxes, each of which has a ‘gripper’. The video shows that the rails can rotate along their long axis as well as slide in and out. The ‘shoulder’ has an additional degree of freedom, flexing or extending. At the elbow, the paired forearms can flex or extend, and each forearm can also rotate along its long axis. The grippers can open and close, and may be able to flex or extend at the wrist boxes as well. The grippers all appear to be identical.
Does this arrangement actually make sense? There seems to be a degree of freedom missing: rotation of the ‘upper arm, which seems to be precluded by a linkage that runs parallel to the upper arm to the elbow box. Without that, I don’t see how you can, say, pass a flat object from a left gripper to a right gripper. Nor can I see what you gain by having the second forearm and gripper per side.
From an in-universe standpoint, is there any justification for this setup? Can anyone provide a real-world justification, other than ‘it looks cool’?
Here is an old robotic space arm (replaced by a more advanced version in 2001):
It appears to have a “shoulder”, “elbow”, and “wrist”. The “wrist”, at least, appears to have a full three degrees of motion. The ISS Special Purpose Dexterous Manipulator (2008) has the two forearms on a common pivoting waist, and can be attached to the end of a regular robotic arm:
but it must be noted that each forearm has multiple joints for a full range of motion.
From the pictures you posted, it looks like the entire arm can swivel where it emerges from the pod, which I think is your missing degree of freedom, but the gripper wrist boxes seem like they could use a third axis, possibly also the base of each forearm.
Correct - at 3:05 in the embedded video, the right arm is rotating so that the grippers are moving in toward the centre.
If the arms can be rotated toward each other as in the video, then unless they are too far apart, the grippers can be made to meet by lifting the ‘elbow’ up, then rotating in toward the centre.
If you want to pick up two things and hold them while you manipulate a third or fourth thing?
I count at least 5 degrees of freedom for each gripper. Combined with the fact that the spacecraft itself can move, that’s a pretty flexible system. Sure, a few extra degrees of freedom would be nice, but probably overkill. Especially as it wasn’t designed for very fine manipulation; that was left for humans in suits (as with the AE-35 repair).
The bit I wonder about is, how does the operator control the extra “hands”? It seems like that would require a lot more training, at a minimum, than arms that are similar to our own.
I wonder if the production designers made it specifically to handle the corpse of Poole, which would have been much more difficult with only one forearm per side. Hence, maybe no real in-universe justification. (Unless the in-universe design engineers were expecting on-board computers to go on murderous rampages.)
Yeah, the arms seem over-engineered for just reaching out and grabbing an anchor point while the astronaut does an EVA, and under-engineered for letting an astronaut do maintenance work while staying in a shirtsleeve environment like the NASA Flexcraft proposal: Benefits of a Single-Person Spacecraft for Weightless Operations - NASA Technical Reports Server (NTRS) . About the only thing that makes sense to me is that the dual grippers might lock into some standardized attachment points on bulk supply containers that need to be moved around, like pallet forks on a forklift. Grabbing a massy container with four grips might keep you from overstressing any particular arm joint and allow you the torque to pitch and yaw the thing around. The ‘upper arms’ have that reinforcing linkage on them already…
The actual procedure followed in the film, where Poole maneuvers the pod to a spot in space approximately a million miles away from the Discovery, then crosses the intervening distance with a tiny MMU-type unit while holding the AE-35 unit in one hand, is the worst of all possible worlds.
As for the control interface, the pod interior has separate controls for flight and manipulator work. The manipulator controls look like you slip your fingers and thumbs into some recesses, where pressure switches could register your hand movements. HAL has an eye on the front of the pod, and he probably is the AI agent interpreting the pilot’s intentions and keeping the extra arms out of the way, etc.
I think the arm design followed the ‘rule of cool’ more than anything else; the pod grippers are big enough that you could snag Poole by an arm or ankle.