We use clockwise and counter-clockwise to describe rotations. These assume you are looking in a direction parallel to the axis of rotation. Are there any terms to describe rotation while looking at a rotating object in a direction perpendicular to the object?
Looking perpendicular to a horizontal axis we might describe the object rotating from the top downward, or the bottom upward. Those descriptions are still relative to the objects position and often unclear. They also assume our viewing direction is also horizontal because above the object ‘bottom upward’ could be either direction.
So aside from clockwise, counter-clockwise, and their exact synonyms, are there other terms for describing the direction of rotation? Feel free to list any of those synonyms too, like ‘widdershins’ for ‘counter-clockwise’.
If you are talking about a reference relative to a ‘fixed’ (non-rotating) frame in the axis of rotating frame the appropriate terminology would be “spinward” and “anti-spinward” (or retrograde and prograde, as @Schnitte observes).
Discussing rotation from an arbitrary reference from not on the axis of rotation requires vector notation for point or rigid bodies, and tensors if you are dealing with continua (fields or collections of particles/bodies represented by statistics).
Just like clockwise and its counter those assume a direction relative to a known point.
The case that got me thinking about this was two lock handles on opposite sides of a woodworking machine. The handles are like turnbuckles with screws threaded in opposite directions on either end and can be oriented to lock and unlock any way that the user wants. You have to be pretty specific to describe how you have set the handles to work on a particular machine. One user told me he draws an arrow on the handles and writes ‘Lock’ next to them. He probably didn’t know about quartenions or the tensors and continua
That’s an interesting example! If I understand the problem, the rotation is relative to the side in which one is standing. You can imagine that for a discipline like aerospace, you also would have to be pretty specific with respect to rotation around the x, y, and z axes. The familiar terms in aircraft are roll, yaw, and pitch.
The point is that, given any rotation around an origin in 3-dimensional Euclidean space, there will be an axis of points which are left invariant by the rotation (at least one; you could have a case like the identity rotation which leaves every point fixed). This is not hard to see, since a rotation is orthogonal and orientation-preserving and must have 1 as an eigenvalue.
But, now, given the axis of rotation, if I tell you that vectors perpendicular to the axis are rotated by a certain angle (30 degrees or whatever), that does not distinguish between that rotation and its inverse. The origin divides the axis into two sides, and you have to specify one. (E.g. not merely the x-axis, but also a positive x direction)
I do not know about what may be best for aeronautical applications, but mathematically you could represent such a rotation as a 3×3 matrix, for instance.
In Quantum Physics, they use the terms “left” and “right” to describe the effect of a spin vector on a momentum vector. Don’t ask me to elaborate on that because i never really understood Quantum Physics even while I was actually taking the class. LOL
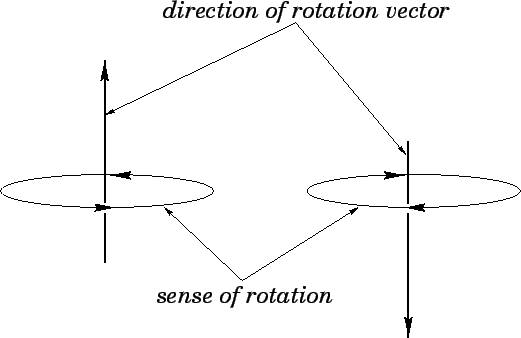
In three dimensions, you can use a vector to represent a force or rotation about an axis.
Picture an (x, y) coordinate plain on the wall in front of you. Now imagine a clock on that wall that’s running backwards. Hold your open right hand out in front of you, with the thumb pointing back at your face. As you curl your fingers into a fist, they’re also turning counter-clockwise.
So that clock on the wall turning backwards is represented by a vector pointing in the direction of your thumb, which is considered the positive z direction.
I’ll see if I can find a picture; probably better than a thousand words.
It seems to me that implicit in any assertion about the direction of rotation is a included assumption of the vector direction of at least the spin axis - i.e. which way is “up”? Any vector notation needs a frame of reference that asserts origin, positive and negative direction(s)?
Oops, I see a diagram illustrating this point posted while I was typing. Darn ninja’s!
Clockwise and counter-clockwise make an assumption about the orientation of the axis relative to the viewer. And when speaking of actual clocks that have a front and back side providing all of the information needed. Some of that info is derived from the the clock face. For an arbitrary rotating object you need more info to specify which side of the object you are facing. Prograde and retrograde also make an assumption of the orientation of the axis when applied to the orbit of planets around the sun.
There could be a terms defined for rotation direction based on an axis perpendicular to viewing direction, but that axis could be rotated relative to the viewer so the motion can’t be described simply using terms like right and left, or up and down, without defining equivalencies like ‘right’ meaning ‘down’ depending on the orientation of the axis. Probably why it’s not done. Assuming the viewing angle is parallel to the axis of rotation makes it simpler to describe.
When I did a sailing trip years ago, they told me to always coils the lines clockwise. They used manilla rope, and said that the spiral winding of the rope fibers meant that you had to lay the rope into a clockwise circle on the deck, then pick up the coil and hang it on the appropriate pin. As you say, though, if I’m looking down at the rope coiling clockwise, someone below decks who was looking up would see it as a counter-clockwise coil. It’s relative to the position of the viewer, so I was never quite sure how the rope knew whether it was coiling clockwise or not.
That’s why I was trying to describe the right-hand rule. As you curl the fingers of your right hand into a fist, the rotational vector is in the direction of your thumb.
Nuts, bolts, and other threaded fittings work that way, too; turn it in the direction of your fingers and it will move in the direction your thumb is pointing. Fittings for propane use a left-hand thread.
I think I would say the object is spinning upward/downward/leftward/rightward on the side facing me.
In web handling we say that a roll is topwound or bottomwound or frontwound or rearwound, to express at what point on the periphery of the roll the web is tangent to it. If you know that and also know whether it is an unwind or rewind roll, you know the rotation direction.
It works fine as long as you can identify a preferred direction for the axis of rotation (which you have to do anyway). For screws, that’s the direction their tip points to. For a clock, it’s the direction that points to the viewer. For planets in the Solar System, it’s the same direction as north.
These are all arbitrary, so what “preferred” means just depends on the specifics of the case in question. But once you do that, you can unambiguously say left-hand or right-hand rotation.
We had a thread some time back asking if it was possible to communicate with aliens a sufficiently far away that the only communication was words, and agree on a direction of rotation. (Probably to determine if they were antimatter critters.)
The answer is that for the most part there is no way of expressing this. (Other than neutral kaon decay to see if they are indeed antimatter.)
Somehow there must be an agreed reference vector. And that can’t be expressed in words alone. Without, it is always ambiguous.
We had a thread awhile ago about “rightie-tightie” which I never understood, because a screw or a bolt is simultaneously turning left and right, depending on the point of reference.