AIUI, helicopters require more power during hover than during moderate-speed forward flight (hover establishes a detrimental local downwash air flow), and hovering in mid-air requires more power than when hovering in ground effect (similar “detrimental downwash” issue that isn’t present when in ground effect). How big is the difference? If mid-air hover is the point of reference, what % of that power level is required when in forward flight, or when in ground effect?
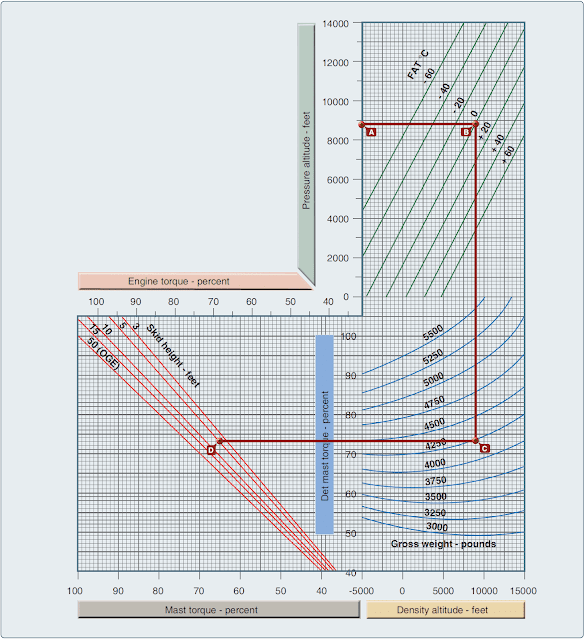
I’m not sure what you mean by “detrimental local downwash air flow”; in level flight helicopters develop lift via a combination of main rotor lift, the quasi-airfoil action of the main rotor, and body lift, while a helicopter in hovering flight only has the first combined by the aforementioned “ground effect” enhancement (reduction of rotor tip vortex losses) plus whatever other uplift effects might occur due to heating and air movement (e.g. urban canyon effects that are a hazard for rotorcraft flying in dense urban areas). It isn’t really possible to state a percentage difference between level flight and hovering because it depends on a number of factors including Takeoff Gross Weight Rating and percentage of gross weight carried, air density (controlled by temperature, altitude, and humidity), rotor dimensions, and the specific aerodynamic properties of the rotorcraft in question. Here is the nomograph figure from the FAA Helicopter Flying Handbook for calculating required mast torque and engine torque given these factors from which you can see the complexity of addressing that question.
Stranger
vortex ring state maybe?
Single screw helicopters need to power a tail rotor in hover. In forward flight that requires very little power. Power requirements vary, small traditional helicopters use between 10% and 20% of engine power for the tail rotor in ground hover. Those requirements vary depending on design and handling characteristics required. In mid-air pilots have to deal with a situation where they can descend in their own downwash which is hard to counter while saying in hover so that will require slightly more power to maintain a hover like that, though I don’t know why it would be done.
ETA: Vortex ring state is the proper name as stated above.
The discussion of vortex ring state linked above contains this, which comes close to answering the OP:
“It is possible to power out of vortex ring state, but this requires having about twice the power it takes to hover.”
No, not talking about vortex ring state, just talking about normal flight conditions.
In a stationary hover at altitude (i.e. out of ground effect), my understanding is that the main rotor develops a strong downwash flow of air (see top image here), requiring the main rotor blades to operate at high angle of attack to provide the required lift, which in turn requires greater power from the engine. Ground effect mitigates that downward flow, reducing the required rotor blade angle of attack and reducing power requirement. Forward flight at a rather modest speed also keeps the heli moving into stationary air, similarly reducing the amount of power required to bear the weight of the aircraft. I was just curious to get a general idea of how different the power requirements were in each of these cases.
{kind=link}
Re: “body lift,” are you talking about an upward force generated by the effect of air movement around the body of the helicopter (as in a lifting body aircraft)?
I understood that, but I didn’t have an answer. Yes, it takes less power to hover in ground effect; and yes, it takes more power to hover out of ground effect. Also, it takes less power to fly in a direction. This is called ‘translational lift’ or ‘effective translational lift’, and it’s the speed at which the rotor system starts getting the benefit of horizontal airflow. In an R22 or 300CB, this is a speed of about 15 knots and is signalled by a slight shudder as you go through it.
But what is the numerical percentage of the difference between IGE hover, OGE hover, and directional flight? I don’t know. FWIW, the rotor RPM is 100% and the engine RPM is 100% in all phases (if you’re doing it perfectly – there are upper and lower limits that gives you a range). Power is measured, on a piston-engine helicopter, with the manifold pressure gauge. If I were current and had the money, I could rent an R22 and tell you how many inches of mercury are showing on the gauge in each condition; but alas, I’m not and I don’t. ![]()
They make those gyrocopter things that turn the rotor entirely by means of forward motion through the air from a drive propeller, so it seems kind of obvious that stationary hovering would take more power. For instance, when you see news footage shot from helicopters, they are almost always circling rather than hovering.
In case of a power failure, you’re already in autorotation. ![]()
So, that “downwash air flow” isn’t detrimental; it is what gives the helicopter all of its lift in stationary flight by transferring momentum from the rotor to motion of the air. The rotors are canted at a higher angle of attack during stationary flight because the rotorcraft isn’t getting lift due to forward motion where it would get lift from the rotor which creates a ‘virtual aerofoil’ through this momentum transfer. The rotorcraft, which is not buoyant in air (at least, not for a vehicle large enough to carry people), has to generate this downward momentum to experience positive lift.
There is a common (if understandable) misconception that the ‘ground effect’ operating on a rotorcraft or fixed wing aircraft is the same phenomena that makes a hovercraft ‘float’, e.g. by packing denser air below the aircraft, and unfortunately the linked image contributes to that. For a rotorcraft in the ground effect region (~1/2 the rotor diameter) what is occurring is that air is constrained from going straight down to ‘infinity’ by the boundary condition of the ground below; this creates an outward lateral motion that acts upon the air coming off the rotor which couples to the parasitic torque that occurs at the free end of the rotors (in the linked image this is shown by the tighter circles indicated as “reduced rotor tip vortex”) and reduces the drag that the rotor experiences in unconfined air, hence the reduction in power required to hover at this low altitude.
In other words, the same amount of “downward flow” of air is required to generate lift but there is less power lost to uselessly spinning the air at the ends of the rotor, which contributes to nothing and can actually create the dangerous condition noted above as a “vortex ring state” (where the ring tip vortices actually produce a positive feedback that pushes the rotorcraft down). You could also alleviate this effect by shaping the rotor blade tips to minimize the creation of these vortices similar to how the wing tips are turned upward on the end of a modern airliner to reduce drag as you see in this image; however, this puts additional stress on the rotor and increases torque because it increases the moment by putting mass at the far outward end of the rotor blade, so it is only beneficial for very powerful rotorcraft and primarily as a means to mitigate the vortex ring state phenomenon rather than reducing power required for hover.
{kind=link}
Yes, some (particularly larger) helicopters have enough fuselage area to actually produce a significant amount of lift in forward flight; not nearly enough to be heavier than air, but certainly sufficient to reduce power requirements at cruising speeds. The Bell 222 that was modified for the 'Eighties show Airwolf, for instance, had some mocked up ‘engine/weapon pods’ mounted around the booms that hold the rear landing gear that reputedly improved the handling characteristics of the helicopter by producing greater lift. A helicopter like the Boeing CH-47 ‘Chinook’, which flies in a slightly nose-up position in flight, can generate a significant amount of lift, and the V-22 ‘Osprey’ tiltrotor craft is designed for the fuselage to produce lift in flight. This isn’t quite the same thing as what is commonly referred to as a ‘lifting body aircraft’ but the principle is similar, although helicopters do not reach high enough forward speed that they could be supported by the lift produced by the fuselage alone.
Stranger