Thinking here of spacecraft that are designed for high-speed reentry, with prime examples being the Apollo return capsule and the space shuttle.
When a spacecraft is just barely beginning to enter the atmosphere, or even before that, how do they measure orientation properly so that they can get the heat-tolerant surfaces where they need to be? AIUI, the super-high temperatures due to Mach heating begin when there’s the faintest whisper of air striking the vehicle, at which point I would expect the air is too thin to affect an angle-of-attack indicator vane - besides which, I would expect an AoA indicator vane would be roasted by the hot slipstream, and besides which ISTM you’d want the vehicle properly oriented even before you get into the atmosphere at all.
I suspect this sort of thing is easy these days with something equivalent to a satellite compass, which uses a spatially-dispersed array of GPS receivers to measure orientation as well as speed and position. But AIUI, the US GPS system didn’t become operational until the mid-/late 1980s. So how did spacecraft manage their reentry without it?
My understanding is that the Apollo command module was balanced such that it would orient itself in the proper aspect for re-entry naturally. It could be rolled slightly to steer.
No Aircraft or spacecraft uses GPS to determine orientation (specifically, angle of attack). There are far more precise and internal methods for doing so, typically using vanes (aircraft), and for spacecraft during reentry, rate gyros and accelerometers.
“Balance” is only meaningful once the aircraft is in the atmosphere, being subjected to aerodynamic forces. Is there really no great precision required of a spacecraft’s orientation before Mach heating begins?
I understand drift is an issue for inertial navigation systems, and that maintaining good accuracy over long distances/times requires regular updates from other systems. But if you’ve spent a week or two in orbit (or traipsing to the moon and back), what do you use as external references to update your position, direction of movement, and orientation?
Mostly, math. Orbital mechanics does a good job of it. There’s not much in space as far as external forces to change one’s expected position once your orbit has been calculated. The most change would come from your own burns (say, you raise or lower your orbit, or a trans lunar injection burn). Corrections are usually made using astro-navigation cameras/computers along with inertial nav systems to recalculate position and orientation.
At the time you’re about to encounter the tippy-most top of the atmosphere, your trajectory (instant position & instant velocity vector) are already absolutely fixed by what you’ve already done earlier. The only thing you can still actively control is your attitude.
Ordinary gyros are good enough for that. Even ignoring radio reception, GPS is utterly useless for attitude. That’s just not what it does or can do
The concept seems simple: By comparing the time delay between the arrival of a particular point on a satellite’s signal at one antenna with its arrival of that point at an antenna a short distance away, it is possible to determine the relative bearing between the two antennas and the satellite that transmitted the signal.
Three-receiver systems (like this one) can measure 2-D heading with an accuracy of 0.25 degrees.
Other than the aforementioned reception problem during the ionization period, is there a reason that using three or more receivers wouldn’t be able to determine the 3D orientation of a spacecraft at or below low-earth orbit altitudes?
Yes, they are not big enough. If you put three receivers on a large ship, separated hundreds of feet apart, sure you can use GPS to determine heading. You won’t be able to get them far enough apart on a spacecraft/aircraft to be used that way.
Ensuring the module enters the Earth’s atmosphere at the right spot for its intended splash down starts way back during the trans-Earth injection burn. Everything is calculated, and they wait until the right moment to head toward earth such that they will arrive within the desired entry corridor. Accuracy of the burn and the need for mid-course corrections were determined by ground based radar and manually measuring the angles to certain stars by the astronauts.
They don’t need to be that far apart. From the link in my previous post:
The two antennas need be separated by only a few wavelengths — a short distance, since the wavelength of the GPS signal is a little more than 7 inches.
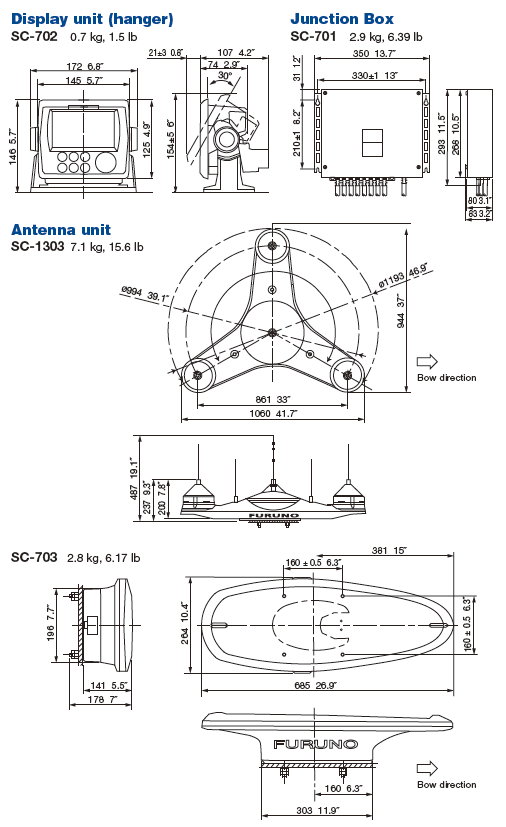
The 3-receiver Furuno SC-130 I linked to has an antenna that’s only about three feet across:
I assume part of the initial setup is telling the system how far fore/aft the bow/stern are from the antenna, thus allowing the reporting of bow/stern velocities along with the ship’s current orientation.
Damn. I’d never have suspected you could get a non-jittery non-junk result from such a short baseline.
It’s easy to forget the essential distinction between precision and accuracy.
GPS at the ground level may have horizontal accuracy +/- several meters and is much worse in the vertical dimension. But the precision between [here] and [10 centimeters from here] can be amazingly wonderfully tight. Especially if both data points are taken nearly simultaneously.
I’m not a professional sailor, but I would guess that canals/channels/ports/harbors are all covered by WAAS so that you get good positional accuracy as well as (with a sat compass) orientational accuracy. With an accurate model of hull geometry, it seems like should be possible to berth a container ship without ever looking at anything but the computer monitor in front of you.
So…a 3-D version of a marine sat compass on a spacecraft. Would it work for measuring 3D orientation?
These systems are measuring rotation normal to the reference ellipsoid of the Earth, so it is essentially rotation ‘in plane’ to the local reference surface versus rotation in three dimensions. An ocean-going ship is at likely going less than 20 kts at near mean sea level, while space vehicle reentering from orbit is somewhere between 7.8 to 10 km/s (more for direct reentry from an interplanetary trajectory). Even if the vehicle could receive signals from the GPS system during atmosphere reentry it wouldn’t be able to calculate instantaneous orientation fast enough, nor able to estimate rotation rate with sufficient fidelity to provide feedback to an autopilot. As @Dorjan and @LSLGuy noted, you need ‘rigid’ body rate measurements at relatively high speed (generally 500 Hz or higher) for that kind of precise attitude control.
Not really; the vehicle needs to maintain good attitude control long before it hits the mesosphere because without functional aerosurfaces it has to use thrusters or movable ballast for orientation and rate control, and the horizon is not distinct enough to make minute-precise orientation measurements or rates, notwithstanding that reentry vehicles do not use visual reference. Most reentry vehicles are ether blunt-arse capsules or cone-forward shapes which use passive stability to maintain correct attitude; the Shuttle, X-37 (and I assume Buran and other ‘spaceplane’ vehicles) use active control (attitude thrusters when exo, aerosurfaces when atmo) to control attitude.
I would suspect that the single GPS receiver is using phase information to determine the relative positions of the antennae. Determining relative phase is going to be quite a bit easier than absolute position.
WRT Apollo, the inertial navigation system was always kept well aligned. There were procedures to correct alignment. One critical piece of equipment was the star sighting telescope that had its own DSKY, allowing an astronaut to directly interact with the guidance computer whilst taking star sightings. Even during the chaos of shutting down the CSM during the Apollo 13 accident precious time and power was spent ensuring the LM AGC got a good alignment loaded. And there is the famous trick of then getting a good enough alignment check using the sun as the target in lieu of a star, since the debris cloud around them made star sightings impossible.
We had a thread a while back about the markings on one of the capsule windows. Lots of ideas as to what they were for, but in the end I think the best answer was the one that during re-entry, if all else failed, the markings could line up the apparent horizon well enough to be sure the angle was good. Doesn’t help get you into the corridor, but might help stay there.
This is my thought. They are balanced so that they attain aerodynamic stability. If you are getting heat from the re-entry encounter with the atmosphere, that is velocity translated into heat and decceleration. That deceleration force is akin to gravity, allowing weight-detecting sensors to determine what the orientation is. Gyros or attitude jets can make any corrections. Presumably the sensors are precise enough to detect attitude and make corrections before temperature on the non-heat-shield areas is a problem.
After all, the vehicle has to be properly oriented for the retro burn to initiate re-entry anyway. A more concise question is - how does the spacecraft orient for reentry burn? Presumably it’s using visual cues, the stars and the earth itself.
The truth is, they didn’t always manage it properly. One X-15 flight crashed and killed the pilot because the plane got sideways at altitude and the pilot didn’t notice.