“This is a simple game. You throw the ball. You hit the ball. You catch the ball.” Skip - Bull Durham
I was watching my Astros play today and got to thinking about how, at least in the 80’s, folks thought robots would be pretty limited in their use because they would only be built to do very specific repetitive tasks (think the robots building cars). Since that time we’ve made some great strides in sensors and software so I got to thinking, how soon could I field a robot baseball team?
As humans, we are pre-wired for throwing, hitting and catching, in fact much of the thought process to accomplish these actions seems to take place instinctively. But teaching robots to play these games requires an integration of sensors and software that we are only just starting to develop. Lets take a look at what are robots would need to be able to do:
Throwing the ball seems pretty easy. It’s simple ballistics, but with variables that software can already compensate for (I think). Deciding where to throw, that’s a whole other issue.
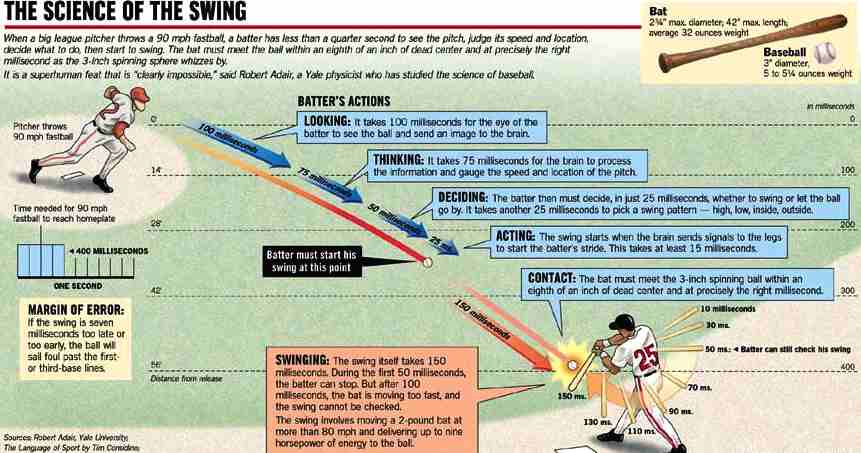
Hitting a baseball is considered one of the hardest things to do in sports. In the major leagues, a batter has something like 225 milliseconds to decide and then begin to swing at a 90mph fast ball. Then he has to be accurate to something like 7 milliseconds for his swing to put the ball in play, not to mention managing the vertical and horizontal axis of the swing to make contact with a 3" diameter ball using a 2 1/2" diameter bat. Millimeters can make the difference between hit or a pop-out.
{kind=link}
In the field, the fielder has to locate the ball, predict a path, plot an intercept point, and make whatever adjustments are necessary during the flight time, and, finally, make the catch.
The question for discussion, do we have the tech to build self-contained robots that could autonomously accomplish these actions? What challenges do we still face?
(I left out base-running, as I think we already have the technology to get robots to run the bases. We have self driving cars, for crying out loud! Then realized there are still a ton of decision that go into base-running, too. However, mentioning it above would have messed with symmetry of the nice set-up from the Skip. ![]() )
)